

System sterowania napędami głowy robota humanoidalnego
-- Sebastian Pawlak, 2002 - 2003.
W ramach pracy magisterskiej brałem udział
w budowie Głowy Robota Humanoidalnego. Projekt tego typu jest
unikalny w skali kraju i rzadko spotykany na świecie.
Głowa humanoida posiada: precyzyjną konstrukcję z aluminium i tworzywa
sztucznego, 5 stopni swobody, 5 serwomechanizmów na bazie dynamicznych
silników prądu stałego, po dwie kamery na każde oko, uszy zrealizowane
w postaci czułych mikrofonów, żyroskop piezoelektryczny.
Oprogramowanie głowy humanoida działa w systemie operacyjnym
czasu rzeczywistego QNX. Zrealizowano moduły: wizji
(śledzenie obiektów, sakady), dźwięku (lokalizacja).
Termin wykonania: 2002-2003
Rodzaj projektu: praca magisterska
Mój udział: projekt, budowa i oprogramowanie systemu
sterowania napędami głowy humanoida;
opracowanie teoretyczne różnych podzespołów
używanych w podobnych systemach;
stworzenie podręcznika języka programowania kontrolera
firmy Galil Motion Control
Zakres prac, które wykonałem:
- zaprogramowanie w języku C działającej w systemie operacyjnym
QNX biblioteki funkcji sterujących napędami głowy
humanoida (ponad 1600 linii kodu);
- wykonanie części systemu napędowego;
- część teoretyczna: oprócz opisu wykonanych modułów i oprogramowania,
zawiera przegląd podzespołów stosowanych w nowoczesnych systemach
sterowania (napędy elektryczne: silniki prądu stałego, silniki
prądu przemiennego, silniki krokowe; encodery: absolutne, inkrementalne;
krańcówki: indukcyjne, elektromechaniczne; transoptory:
odbiciowe, szczelinowe; sterowniki serwomechanizmów;
wzmacniacze z PWM);
przewodnik po wewnętrznym języku programowania kontrolera
serwomechanizmów firmy Galil Motion Control poparty przykładami
rzeczywistych systemów sterowania.
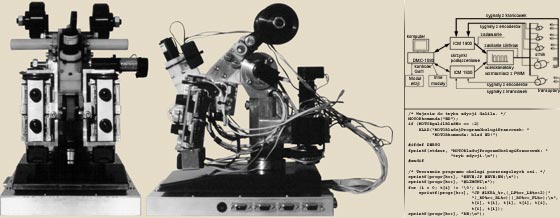
Zdjęcie przedstawiające głowę robota humanoidalnego:
;)
Głowa humanoida będąca celem projektu posiada następujące parametry i
właściwości:
- Precyzyjna konstrukcja z aluminium i tworzywa sztucznego;
- 5 stopni swobody (szyja-poziom, szyja-pion, oczy-pion, oko lewe-poziom,
oko prawe-poziom);
- Po dwie kamery (szerokokątna i wąskokątna) na oko;
- 5 serwomechanizmów na bazie dynamicznych silników prądu stałego firm
Faulhaber i Maxon Motors;
- Uszy zrealizowane na bazie dwóch czułych mikrofonów;
- Żyroskop piezoelektryczny;
- Podgląd obrazu zrealizowany jest przy pomocy splitera i monitora
przemysłowego;
- Oprogramowanie działa w systemie czasu rzeczywistego QNX na trzech
komputerach połączonych sieci.;
- Zaimplementowany system sterowania oparty o sterownik Galil DMC-1880,
6-kanałowy wzmacniacz PWM, serwomechanizmy i optyczne wyłączniki
krańcowe;
- Zaimplementowany system wizji oparty o framegrabbery PXC --
zaprogramowano ruchy sakadyczne (błyskawiczne skupianie wzroku),
śledzenie obiektu;
- Zaimplementowano system lokalizacji dźwięku na płaszczyźnie poziomej
oparty o wspomniane mikrofony i kartę akwizycji danych NuDaq;
- Zaimplementowano system stabilizacji obrazu oparty m.in. o wspomniany
żyroskop i informacje zwrotne z encoderów serwomechanizmów;
- Zaimplementowano system uwagi oparty o mapę aktywacji;
- Zaimplementowano skojarzony z projektem głowy humanoida moduł
stereowizji;
- W najbliższym czasie powstanie skojarzony z projektem głowy humanoida moduł
rozpoznawania i identyfikacji twarzy.
Projekt realizowany jest pod kierunkiem prof. dra hab. Lecha Polkowskiego,
który to umożliwił nam pracę nad tak rozległym, zaawansowanym i
kosztownym przedsięwzięciem.

